Z Domain Model For Discrete Time Pll

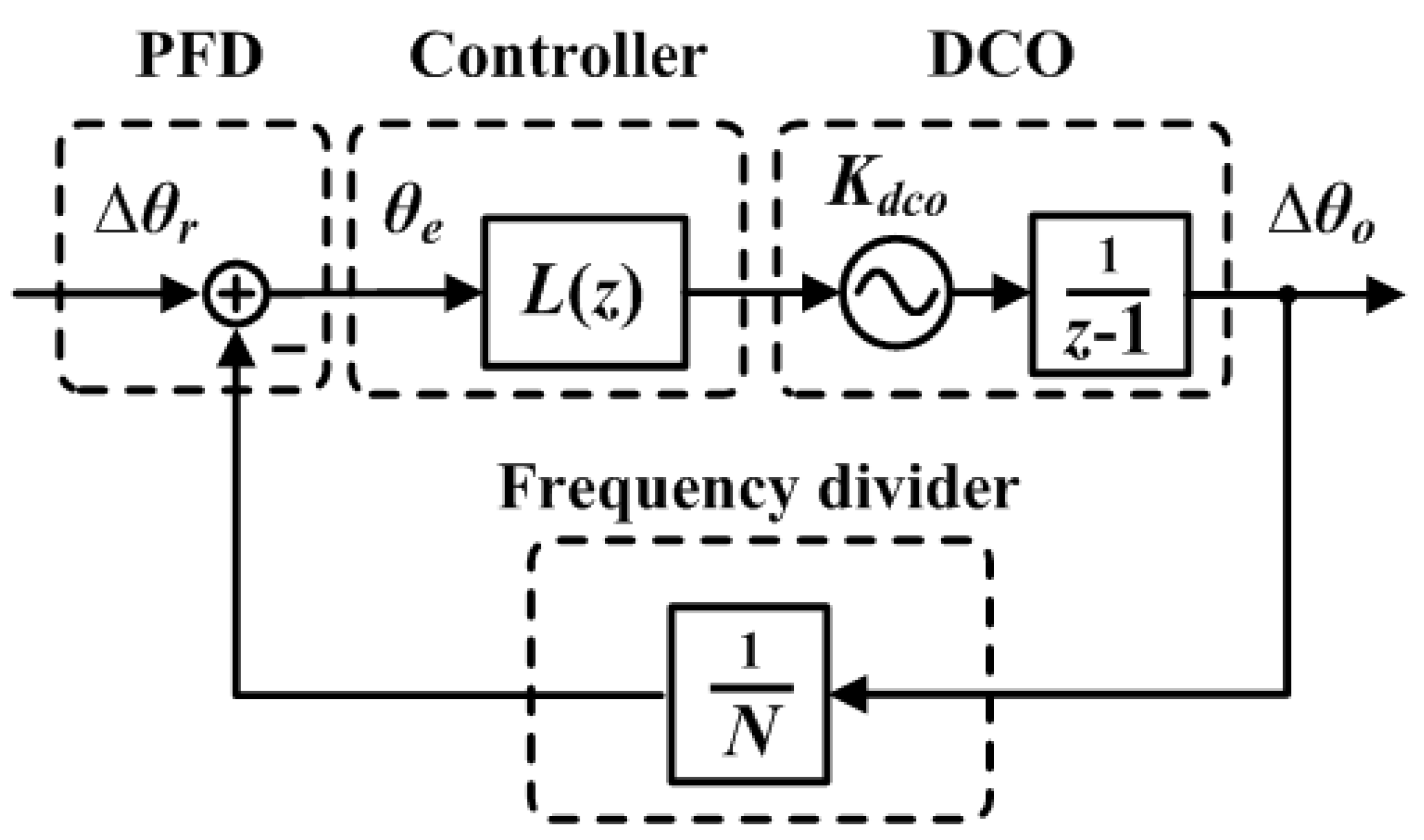
Z Domain Model Of The Controller Based Adpll Download Scientific Diagram

Conventional Discrete Time Pll Model Download Scientific Diagram

Pdf A Z Domain Model And Analysis Of Phase Domain All Digital Phase Locked Loops

A Z Domain Model Of A Phase Domain All Digital Phase Locked Loop Download Scientific Diagram

A Discrete Time Pll Modeling The Changes In Phase 1 And In Frequency 1 Download Scientific Diagram

Proposed Discrete Time Pll Model Noted As Above The Frequency Download Scientific Diagram
Scott sa r a sin wet 4.
Z domain model for discrete time pll. For plls with digital inputs and outputs however a discrete time z domain model more accurately describes loop behavior. Continuous time versus discrete time systems pll work was originally based upon continuous time dynamics and engineers utilized the laplace transform to mathematically describe linear pll behavior. This model can be applied directly to an analog pll. The well known s domain model for continuous time phase locked loops plls is a fundamental tool for the linearized analysis of these systems.
For pll s with digital inputs and outputs however a discrete time z domain model more accurately describes loop behavior. 2 the summing node and k p gain block repre sent the operation of the phase detector in the frequency domain. The world has however gone digital and with it time has been discretized and dynamic quantities sampled. In this paper a methodology is described for obtaining an accurate z.
Z domain model for discrete time pll s jerrell p. Modeling of a digital pll in z domain so far all the modeling done in previous sessions are in the continuous time domain. The phase detector is assumed to be a linear analog. The well known s domain model for sinusoidal phase locked loops is a fundamental tool for the linearized analysis of these systems.
For pll s with digital inputs and outputs however a discrete time z domain model more accurately describes loop behavior. Normally the output responses of a discrete time control system are also functions of continuous time. A z domain model and analysis of phase domain all digital phase locked loops. The input phase modulation 4 t and oscillator output 4 o t are continuous functions of time.
Modeling of digital pll dpll in the discrete time domain z domain so far all the modeling shown is in the continuous time domain. But the design requirement is for a digital pll. Linear discrete software pll model from 1. This model can directly be applied to an analog pll but the design requirement is to build a digital pll dpll normally the output responses of a discrete time control system are also functions of continuous time.
The existing discrete time pll models do not capture this effect since they either consider only plls with a frequency multiplication factor n equal to one 5 6 or model the divideby n circuit.
Https Ieeexplore Ieee Org Iel5 31 565 00014463 Pdf
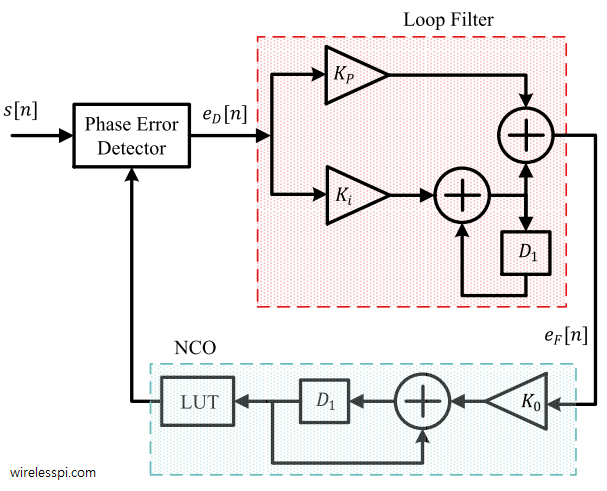
Phase Locked Loop Pll In A Software Defined Radio Sdr Wireless Pi

Pdf Designs Of All Digital Phase Locked Loop

Analysis Of The Effect Of Pfd Sampling On Charge Pump Pll Stability Semantic Scholar

Pdf Introduction To Phase Locked Loop System Modeling Semantic Scholar

Pdf A Design Procedure For All Digital Phase Locked Loops Based On A Charge Pump Phase Locked Loop Analogy Semantic Scholar

A Digital Loop Filter For A Phase Locked Loop Semantic Scholar
Http Www Ti Com Cn Cn Lit An Slyt169 Slyt169 Pdf
Electronics Free Full Text Design And Emulation Of All Digital Phase Locked Loop On Fpga Html

Pdf A Mixed Pll Dll Architecture For Low Jitter Clock Generation
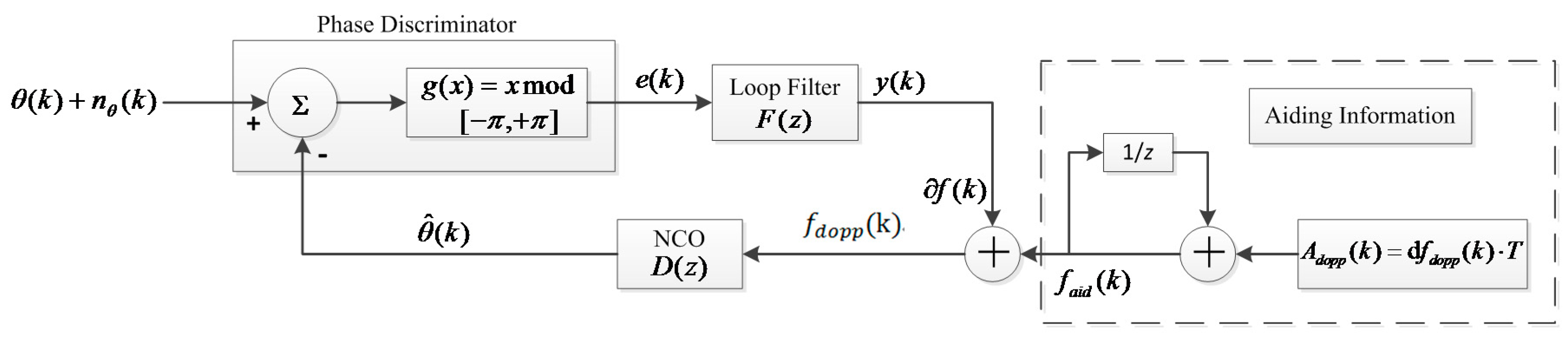
Sensors Free Full Text An Adaptive Ins Aided Pll Tracking Method For Gnss Receivers In Harsh Environments Html

G X X A Sin X Max X P 0 G X P Min X 0 P G X P Download Scientific Diagram
Http Ieeexplore Ieee Org Iel5 7344 19933 00921840 Pdf
